
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

रडार कम्युनिकेशन सिस्टममध्ये वेव्हफॉर्म ऑप्टिमायझेशन समस्या
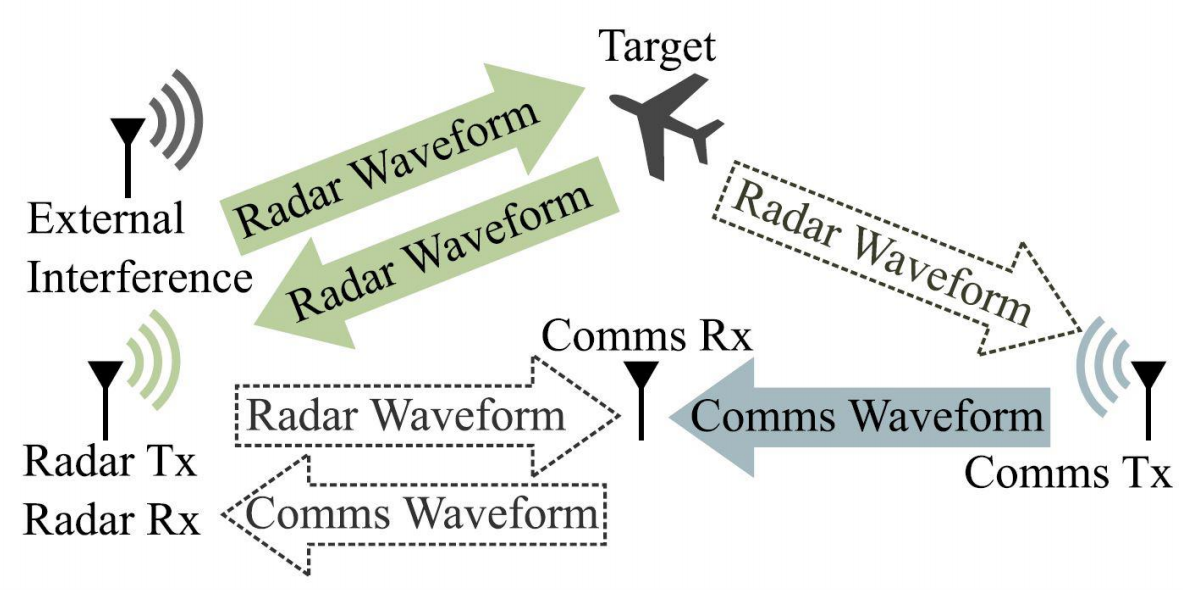
कनेक्टेड उपकरणांच्या संख्येत होणारी स्फोटक वाढ आणि वायरलेस स्पेक्ट्रमची वाढती मागणी यामुळे, विमाने आणि जहाजे, जसे की रडार, डेटा लिंक्स आणि इलेक्ट्रॉनिक युद्ध प्रणाली यांसारख्या प्लॅटफॉर्मवर एकाधिक RF कार्ये समाकलित करणे आवश्यक आहे. ड्युअल फंक्शन रडार कम्युनिकेशन सिस्टमची रचना करून, एकाच हार्डवेअर प्लॅटफॉर्मवर स्पेक्ट्रम सामायिक करणे आणि एकाच वेळी लक्ष्य शोधणे आणि वायरलेस कम्युनिकेशनला समर्थन देणे शक्य आहे. रडार आणि संप्रेषण कार्यप्रदर्शन संतुलित करून, ड्युअल फंक्शन रडार कम्युनिकेशन सिस्टमची रचना साध्य केली जाऊ शकते, जे एक आशादायक तंत्रज्ञान आहे.
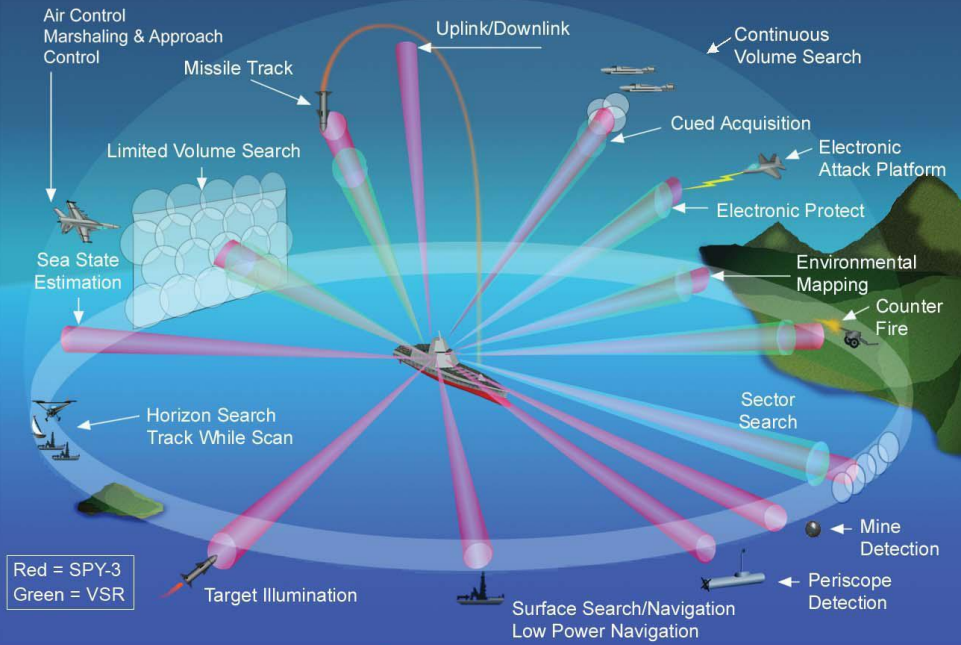
वेव्हफॉर्म डिझाइन हे रडार कम्युनिकेशन सिस्टीममधील प्रमुख कार्यांपैकी एक आहे. एक चांगला वेव्हफॉर्म कार्यक्षम ऑब्जेक्ट शोध आणि डेटा ट्रान्समिशन साध्य करण्यासाठी सक्षम असणे आवश्यक आहे. वेव्हफॉर्म्सची रचना करताना, सिग्नल-टू-आवाज गुणोत्तर, लक्ष्याचा डॉपलर प्रभाव, मल्टीपाथ इफेक्ट इत्यादीसारख्या अनेक घटकांचा विचार करणे आवश्यक आहे. दरम्यान, रडार आणि संप्रेषणाच्या वेगवेगळ्या कार्यपद्धतींमुळे, वेव्हफॉर्म सक्षम असणे आवश्यक आहे. दोघांच्या गरजा पूर्ण करण्यासाठी.
ड्युअल फंक्शन रडार कम्युनिकेशन सिस्टमच्या इष्टतम वेव्हफॉर्म डिझाइनसाठी सध्या कोणतीही निश्चित डिझाइन पद्धत नाही, जी विशिष्ट अनुप्रयोग परिस्थिती आणि आवश्यकतांवर आधारित असणे आवश्यक आहे. येथे काही संभाव्य डिझाइन पद्धती आहेत:
1. ऑप्टिमायझेशन सिद्धांतावर आधारित डिझाइन: कार्यप्रदर्शन निर्देशकांचे गणितीय मॉडेल (जसे की ओळख कार्यप्रदर्शन, संप्रेषण दर इ.) स्थापित करून, आणि नंतर वेव्हफॉर्म शोधण्यासाठी ऑप्टिमायझेशन अल्गोरिदम (जसे की ग्रेडियंट डिसेंट, अनुवांशिक अल्गोरिदम इ.) वापरून जे कार्यप्रदर्शन निर्देशकांना कमाल करते. या पद्धतीसाठी अचूक लक्ष्य मॉडेल आणि प्रभावी ऑप्टिमायझेशन अल्गोरिदम आवश्यक आहेत आणि अनेक आव्हानांचा सामना करावा लागतो.
प्रथम, रडार आणि संप्रेषणाच्या आवश्यकता एकमेकांशी संघर्ष करू शकतात, ज्यामुळे दोन्ही एकाच वेळी पूर्ण करू शकणारे वेव्हफॉर्म शोधणे कठीण होते. दुसरे म्हणजे, वास्तविक रडार आणि संप्रेषण वातावरण मॉडेलपेक्षा भिन्न असू शकते, ज्यामुळे व्यावहारिक वापरामध्ये डिझाइन केलेल्या वेव्हफॉर्मची खराब कामगिरी होऊ शकते. शेवटी, अल्गोरिदम ऑप्टिमाइझ करण्यासाठी मोठ्या प्रमाणात संगणकीय संसाधनांची आवश्यकता असू शकते, जे व्यावहारिक प्रणालींमध्ये त्यांचा अनुप्रयोग मर्यादित करू शकतात.
2. मशीन लर्निंग आधारित डिझाइन: मोठ्या प्रमाणात प्रशिक्षण डेटाद्वारे इष्टतम वेव्हफॉर्म जाणून घेण्यासाठी मशीन लर्निंग अल्गोरिदम वापरणे. ही पद्धत जटिल वातावरण आणि अनिश्चितता हाताळू शकते, परंतु मोठ्या प्रमाणात डेटा आणि संगणकीय संसाधने आवश्यक आहेत.
3. अनुभवावर आधारित डिझाइन: विद्यमान रडार आणि कम्युनिकेशन सिस्टमच्या अनुभवावर आधारित, चाचणी आणि त्रुटीद्वारे वेव्हफॉर्म डिझाइन करणे. ही पद्धत सोपी आणि व्यवहार्य आहे, परंतु इष्टतम उपाय शोधण्यात सक्षम नाही.
वरील डिझाइन पद्धतींचे त्यांचे फायदे आणि तोटे आहेत आणि वास्तविक डिझाइनसाठी अनेक पद्धतींचे संयोजन आवश्यक असू शकते. याव्यतिरिक्त, रडार आणि दळणवळण आवश्यकतांमधील संभाव्य संघर्षांमुळे, डिझाइन प्रक्रियेस देखील या संघर्षांचे निराकरण करणे आवश्यक आहे. उदाहरणार्थ, डिटेक्शन परफॉर्मन्स आणि कम्युनिकेशन स्पीड संतुलित करून किंवा डायनॅमिकली ॲडजस्ट करता येणारे वेव्हफॉर्म डिझाइन करून वेगवेगळ्या आवश्यकता पूर्ण केल्या जाऊ शकतात.